
【導讀】在過去的2~3年間,端到端技術大規模鋪開,為輔助駕駛體驗帶來了顯著進展。與此同時,基于推理能力的人工智能出現,使行業真正迎來了一個類似ChatGPT的里程碑時刻。從當前技術發展來看,通往L4級完全自動駕駛甚至無人駕駛的道路已經相對清晰。在這一大背景下,英偉達(NVIDIA)一直在努力推動整個行業盡早實現L4級自動駕駛,比如今年推出了面向輔助駕駛汽車的開放模型Alpamayo,成為今年L4發展的一個重要里程碑。
不過,通向L4的道路一定需要一個完整的平臺化的解決方案,英偉達其實一直在朝向這個方向努力。對于L4級自動駕駛,英偉達當下的打法究竟是怎么樣的?2026年,北京車展期間,英偉達全球副總裁吳新宙向包括EEWorld在內的媒體進行了深度分享。
自動駕駛是物理AI最早量產場景
“提供全棧解決方案只是工作的一部分,對英偉達而言更重要的使命是賦能整個產業,推動其盡快向L3或L4級無人駕駛能力發展。“吳新宙如是說。
他介紹,英偉達一直是人工智能領域 重要的推動者。自動駕駛作為人工智能最大的受益者之一,其發展歷程與AI技術演進密不可分。2012年AlexNet出現后,感知AI能力使許多傳統計算機視覺難以解決的問題得以通過數據驅動的方法解決。2017年Transformer架構打開了新的大門,首次實現360度感知的穩定與優秀表現,使基于BEV的感知得以落地,全模型方法開始應用于規控領域。近兩年出現的代理式AI,特別是大語言模型帶來的推理能力,成為高效且規模化解決所有邊緣場景問題的關鍵鑰匙。
從感知AI到代理式AI,最終落地到物理世界,就是物理AI。英偉達創始人兼首席執行官黃仁勛多次強調,未來十年是公司乃至整個產業和科技行業最核心的挑戰。
吳新宙強調,“英偉達堅信,自動駕駛將是物理AI領域最早實現量產和大規模落地的場景。”
從經濟價值看,全球每年車輛行駛里程約為13萬億英里,其中自動駕駛歷程僅為7億英里,占比僅為0.006%左右,幾乎可以忽略不計。英偉達相信 每一英里最終都將變為自動駕駛。若每英里自動駕駛解決方案價值1~2美元,這將是一個體量巨大的市場。更重要的是,技術已經發展到能夠實現L4的時間節點,這是令人激動的時刻。
五層“蛋糕”服務架構
解決物理AI問題需要三臺關鍵計算機:第一臺是車端計算機,英偉達已在這方面投入十年時間,做了大量工作;第二臺是云端訓練計算機,所有模型都在英偉達的CUDA生態中成長,該生態是所有模型的根基;第三臺是仿真計算機,在端到端模型時代,仿真變得尤為重要。
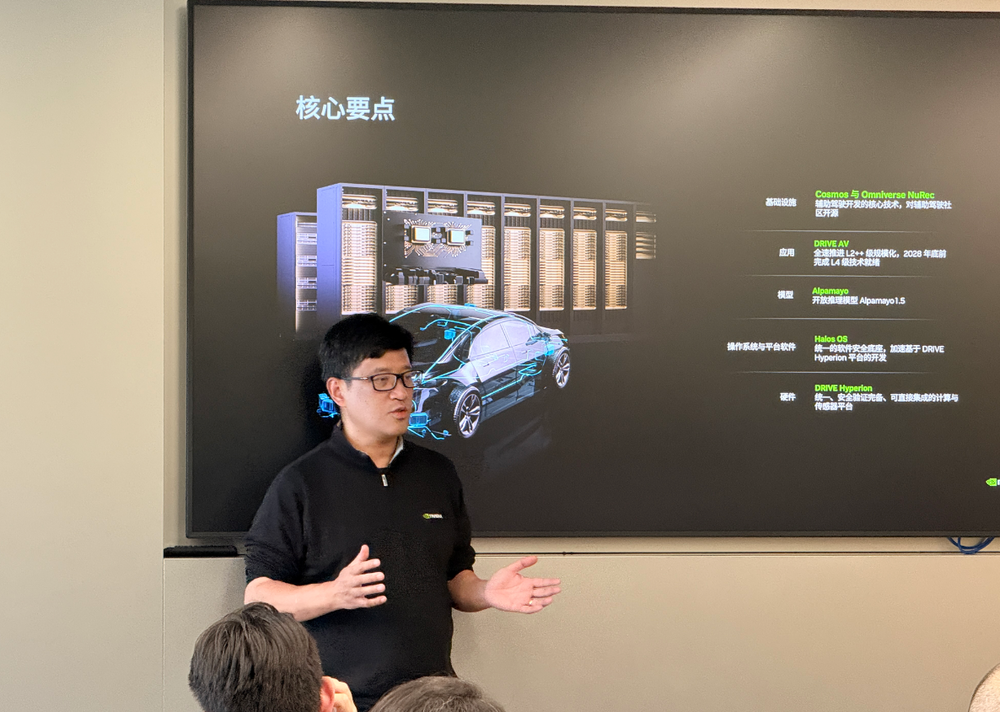
英偉達在這三臺計算機上都投入了強大的產品,助力物理AI的發展。基于三大計算平臺,英偉達構建了五層“蛋糕”的技術服務架構,吳新宙逐層進行了介紹:
第一層,基礎設施:NVIDIA Cosmos and Omniverse NuRec
涵蓋云端訓練、數據處理、標注、仿真驗證等全流程工具。英偉達憑借數十年圖形技術積累,具備物理世界像素級重建、照片級虛擬場景生成能力,可高效支撐輔助 駕駛模型訓練與驗證,日均完成 200萬次場景仿真驗證,通過場景編輯、環境倍增等技術,將數據驗證效率提升5~10倍。
第二層,應用:NVIDIA DRIVE AV
為缺乏自主研發能力的車企提供一站式 “交鑰匙” 解決方案,目前已與奔馳、Lucid等多家車企達成深度合作,助力其車型快速具備高階輔助 駕駛能力。
第三層,開放模型:NVIDIA Alpamayo
Alpamayo是秘魯一座著名的山峰,被稱為最美麗但也最難攀登的山。這個名字恰如其分地形容了解決端到端輔助 駕駛問題的難度。英偉達所做的是通過硬件、操作系統和開放模型,盡可能降低這一門檻。
車廠或軟件提供商可以從Alpamayo開始進行微調,產生產品級方案,在英偉達硬件平臺和操作系統上順暢運行。Alpamayo模型在Hugging Face上獲得了第二名的下載量,在LingoQA榜單上的輔助駕駛推理模型排名第一。
今年GTC期間,英偉達發布的Alpamayo的1.5版本,新增了導航能力,并增加了靈活的多攝像頭支持和可配置的攝像頭參數,簡化了同一套 AI 駕駛棧在不同車型、不同傳感器配置中的復用,同時保留與現有Alpamayo集成的兼容性。吳新宙預告,今年6月將發布2.0版本,模型能力持續迭代。
訓練Alpamayo模型使用了8萬小時駕駛數據,但因其主干基于Cosmos系列蒸餾而來,而Cosmos是基于互聯網和YouTube等全球視頻數據訓練的基礎模型,因此繼承了對物理世界的深刻理解,再針對駕駛數據進行最后的微調。
第四層,操作系統和平臺軟件:NVIDIA Halos OS
Halos OS是對原有Drive OS的擴充。Drive OS是運行在芯片中的操作系統軟件,英偉達以最高安全等級要求進行開發,使車廠或軟件開發者可以在安全無后顧之憂的情況下,在英偉達平臺上開發車用軟件。
對Halos OS的擴充包括加入Halos SDK,使車廠能夠更容易地開發軟件。其中包含車輛擴展層和傳感器擴展層,將這兩層標準化后,車廠適配不同硬件、傳感器或車輛的工作量將大幅減少。
此外,Halos OS還將主動安全系統和一些基于規則的經典算法納入其中。模型供應商或軟件開發者可以在最高安全等級的硬件和底層操作系統上,利用規則兜底方案,更容易地通過各種安全認證,包括中國的CNCAP、美國的FMVSS、NCAP等。
第五層,硬件:NVIDIA Drive Hyperion
涵蓋車載計算芯片與傳感器,英偉達和業界一同定義了支持 L4 級無人駕駛的標準化硬件平臺,實現數據互通共享。
Drive Hyperion平臺基于Thor芯片架構打造,該架構也是云端大模型訓練的核心算力支撐。針對車載端存儲帶寬限制,芯片支持FP4精度,有效提升算力利用率,總算力較前代產品大幅提升。
傳感器配置分為基礎版與高階版:基礎版以純視覺+毫米波雷達為主,配備10個高清外置攝像頭、3個毫米波雷達、12個超聲波傳感器、1個DRIVE AGX Thor,可支撐優質L2+級體驗;高階版面向L3、L4 級,配備14個高清外置攝像頭、9個毫米波雷達、12個超聲波雷達、1個激光雷達,2個DRIVE AGX Thor架構ECU,實現控制器與傳感器全冗余,確保單點失效下系統仍可完成最小風險操作,保障行駛安全。依托該標準化配置,英偉達正與合作伙伴采集百萬小時級駕駛數據并向生態開放,大幅降低行業數據門檻。
英偉達輔助駕駛的核心戰略
吳新宙強調,英偉達想要推動行業采用Drive Hyperion標準化平臺,該平臺硬件與傳感器均經過充分驗證,可實現數據互通共享;同時推廣Halos OS高安全等級操作系統,降低開發者門檻;持續開放 Alpamayo模型、配套數據與工具,削減行業研發成本;最終為有需求的車企提供全棧解決方案。
英偉達在輔助駕駛領域已深耕十年,從早期芯片供應,逐步拓展至云端訓練中心、全棧車載解決方案。2017年英偉達率先提出端到端輔助駕駛解決方案,2020年與奔馳達成合作,2025 年完成歐美地區方案交付,后續還將與更多車企展開合作。
當前英偉達的算法棧采用混合端到端架構,以模仿學習為核心,實現類人駕駛體驗,同時并行運行經典規則算法棧,形成安全護欄。2025年,該方案在歐洲E-NCAP測評中斬獲年度第一。量產方案迭代頻次極高,日均完成海量仿真驗證。通過經典算法兜底,可有效提升駕乘安全性與舒適度,應對各類復雜路況。
目前,英偉達正推進L2++全球化規模化落地,已完成舊金山、洛杉磯、紐約、倫敦、慕尼黑等城市路測,目標在2026年實現全球化量產。與此同時,方案正加速向L3、L4級遷移,通過雙算法棧冗余、硬件冗余與激光雷達加持,滿足高階自動駕駛的安全要求。
從時間規劃來看:2025年官宣與奔馳合作進展;2026年實現L2++點對點功能在美國落地,并拓展至歐洲等地區;2027年計劃與合作伙伴在部分城市開展L4試點;2028年為洛杉磯奧運會提供L4級無人駕駛服務,計劃覆蓋20~30個城市。
除輔助駕駛外,英偉達還依托 AI 技術深度賦能車企整車設計、生產制造、產線規劃等環節,助力車企全流程智能化升級,提升運營效率。
英偉達對于當下輔助駕駛的判斷
談及當下爭議不休的激光雷達,吳新宙給出了判斷:對于L2+級輔助駕駛,純視覺路線不僅可行,其感知上限“極高”,視覺模型所依賴的像素密度遠超激光雷達。然而,當系統邁向L3與L4級時,激光雷達的角色便從可選變為必要。“它是實現傳感器冗余、保障安全的關鍵部件。” 目前,英偉達正聯合歐美產業鏈伙伴,持續推進激光雷達供應的穩定性,為L3、L4級技術的規模化落地筑牢基礎。
有人說,L3這一階段會被跳過,行業會直接步入L4階段。對此,吳新宙表示,從技術層面來看,當前輔助 駕駛已經沒有核心卡點。隨著生成式AI和推理AI的發展,以往難以解決的極端場景、決策邏輯等問題,都已經有了可行的解決方案。現在的主要挑戰在于系統工程的整合和規模化落地的工程量。
他指出,輔助駕駛不是單一技術的突破,而是硬件、軟件、數據、仿真等多環節的協同,需要大量的工程迭代和驗證。至于L3與L4級,兩者在技術難度上差距并不大,更多是應用場景和責任界定的差異:L3要求駕駛員在10秒內接管車輛,這10秒內車輛需承擔完全責任,它在高速場景下能有效解放駕駛員雙手,具備明確的用戶價值;而L4級則更多依賴云端遠程運營支撐,對于年銷百萬輛的車企而言,為每輛車配備這種能力成本極高。
因此,短期內L3與L4級將并行發展,一個服務于個人出行的效率提升,一個運行于運營場景的商業閉環。
艙駕融合是當下行業一大趨勢,吳新宙表示,車輛本質上其實也是一種移動機器人,座艙交互與輔助駕駛對安全等級要求不同,短期內可能不會共用同一顆芯片。但大模型的能力將逐步共享,最終走向感知、決策與交互的一體化。在輔助駕駛芯片上同時提供人機交互能力,這是非常值得期待的方向。
同樣值得期待的,還有輔助駕駛與機器人賽道的重合關系。吳新宙將兩者都歸入物理AI的核心范疇,但它指出輔助駕駛已率先接近規模化落地的臨界點。英偉達同樣看好機器人,但眼下,輔助駕駛是物理AI浪潮中最先涌起的那個浪頭。
面對部分車企掀起的自研芯片浪潮,吳新宙也真誠地保持歡迎和開放的心態。“英偉達并不排斥車企自研芯片,”他說,“我們始終以推動整個生態發展為核心。”即便一家車企完全放棄了英偉達的車載推理芯片,它可能仍然離不開英偉達的云端訓練、仿真算力與開源技術。在吳新宙看來,AI產業整體的發展,最終一定會反哺英偉達的算力需求,這是一場沒有輸家的共生游戲。

